Wheels
wheel components
Rapier constants
const RAPIER_UPDATE_PRIORITY = -50
const AFTER_RAPIER_UPDATE = RAPIER_UPDATE_PRIORITY - 1
const AXLE_TO_CHASSIS_JOINT_STIFFNESS = 150000
const AXLE_TO_CHASSIS_JOINT_DAMPING = 20
const DRIVEN_WHEEL_FORCE = 600
const DRIVEN_WHEEL_DAMPING = 5
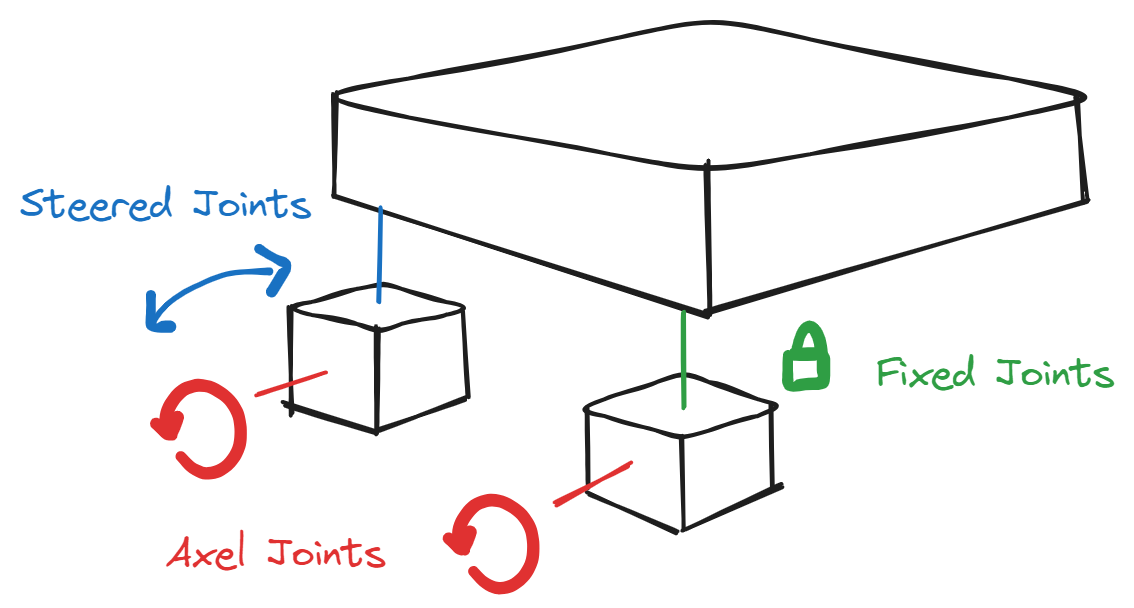
Fixed Joints
type FixedJointProps = {
body: RefObject<RapierRigidBody>
wheel: RefObject<RapierRigidBody>
body1Anchor: Vector3Tuple
body1LocalFrame: Vector4Tuple
body2Anchor: Vector3Tuple
body2LocalFrame: Vector4Tuple
}
const FixedJoint = ({ body, wheel, body1Anchor, body1LocalFrame, body2Anchor, body2LocalFrame }: FixedJointProps) => {
useFixedJoint(body, wheel, [body1Anchor, body1LocalFrame, body2Anchor, body2LocalFrame])
return null
}
Axel Joints
type AxleJointProps = {
body: RefObject<RapierRigidBody>
wheel: RefObject<RapierRigidBody>
bodyAnchor: Vector3Tuple
wheelAnchor: Vector3Tuple
rotationAxis: Vector3Tuple
isDriven: boolean
}
const AxleJoint = ({ body, wheel, bodyAnchor, wheelAnchor, rotationAxis, isDriven }: AxleJointProps) => {
const joint = useRevoluteJoint(body, wheel, [bodyAnchor, wheelAnchor, rotationAxis])
const forwardPressed = useKeyboardControls((state) => state.forward)
const backwardPressed = useKeyboardControls((state) => state.back)
const brakePressed = useKeyboardControls((state) => state.brake)
useEffect(() => {
if (!isDriven) return
let forward = 0
if (brakePressed) {
forward = 0
joint.current?.configureMotorVelocity(0, 0)
return
}
if (forwardPressed) forward += 1
if (backwardPressed) forward -= 1
forward *= DRIVEN_WHEEL_FORCE
if (forward !== 0) {
wheel.current?.wakeUp()
}
joint.current?.configureMotorVelocity(forward, DRIVEN_WHEEL_DAMPING)
}, [forwardPressed, backwardPressed, brakePressed])
return null
}
Steered Joints
type SteeredJointProps = {
body: RefObject<RapierRigidBody>
wheel: RefObject<RapierRigidBody>
bodyAnchor: Vector3Tuple
wheelAnchor: Vector3Tuple
rotationAxis: Vector3Tuple
}
const SteeredJoint = ({ body, wheel, bodyAnchor, wheelAnchor, rotationAxis }: SteeredJointProps) => {
const joint = useRevoluteJoint(body, wheel, [bodyAnchor, wheelAnchor, rotationAxis])
const left = useKeyboardControls((state) => state.left)
const right = useKeyboardControls((state) => state.right)
const targetPos = left ? 0.25 : right ? -0.25 : 0
useEffect(() => {
joint.current?.configureMotorPosition(targetPos, AXLE_TO_CHASSIS_JOINT_STIFFNESS, AXLE_TO_CHASSIS_JOINT_DAMPING)
}, [left, right])
return null
}
Wheels
type WheelInfo = {
axlePosition: Vector3Tuple
wheelPosition: Vector3Tuple
isSteered: boolean
side: 'left' | 'right'
isDriven: boolean
}
const wheels: WheelInfo[] = [
{
axlePosition: [-1.2, -0.6, 0.7],
wheelPosition: [-1.2, -0.4, 1],
isSteered: true,
side: 'left',
isDriven: false,
},
{
axlePosition: [-1.2, -0.6, -0.7],
wheelPosition: [-1.2, -0.4, -1],
isSteered: true,
side: 'right',
isDriven: false,
},
{
axlePosition: [1.2, -0.6, 0.7],
wheelPosition: [1.2, -0.4, 1],
isSteered: false,
side: 'left',
isDriven: true,
},
{
axlePosition: [1.2, -0.6, -0.7],
wheelPosition: [1.2, -0.4, -1],
isSteered: false,
side: 'right',
isDriven: true,
},
]
Refs
const wheelRefs = useRef<RefObject<RapierRigidBody>[]>(wheels.map(() => createRef()))
const axleRefs = useRef<RefObject<RapierRigidBody>[]>(wheels.map(() => createRef()))
JSX wheels
{wheels.map((wheel, i) => (
<React.Fragment key={i}>
{/* axle */}
<RigidBody ref={axleRefs.current[i]} position={wheel.axlePosition} colliders="cuboid">
<mesh rotation={[Math.PI / 2, 0, 0]} castShadow receiveShadow>
<boxGeometry args={[0.3, 0.3, 0.3]} />
<meshStandardMaterial color="white" opacity={0.001} transparent />
</mesh>
</RigidBody>
{/* wheel */}
<RigidBody ref={wheelRefs.current[i]} position={wheel.wheelPosition} colliders={false}>
<mesh rotation-x={-Math.PI / 2} castShadow receiveShadow>
<cylinderGeometry args={[0.25, 0.25, 0.24, 32]} />
<meshStandardMaterial color="#666" />
</mesh>
<mesh rotation-x={-Math.PI / 2}>
<cylinderGeometry args={[0.251, 0.251, 0.241, 16]} />
<meshStandardMaterial color="#000" wireframe />
</mesh>
<CylinderCollider mass={0.5} friction={5} args={[0.125, 0.25]} rotation={[-Math.PI / 2, 0, 0]} />
</RigidBody>
{/* axle to chassis joint */}
{!wheel.isSteered ? (
<FixedJoint
body={chassisRef}
wheel={axleRefs.current[i]}
body1Anchor={wheel.axlePosition}
body1LocalFrame={[0, 0, 0, 1]}
body2Anchor={[0, 0, 0]}
body2LocalFrame={[0, 0, 0, 1]}
/>
) : (
<SteeredJoint
body={chassisRef}
wheel={axleRefs.current[i]}
bodyAnchor={wheel.axlePosition}
wheelAnchor={[0, 0, 0]}
rotationAxis={[0, 1, 0]}
/>
)}
{/* wheel to axle joint */}
<AxleJoint
body={axleRefs.current[i]}
wheel={wheelRefs.current[i]}
bodyAnchor={[0, 0, wheel.side === 'left' ? 0.35 : -0.35]}
wheelAnchor={[0, 0, 0]}
rotationAxis={[0, 0, 1]}
isDriven={wheel.isDriven}
/>
</React.Fragment>
))}
Model Wheels
<mesh geometry={nodes.tireFL1.geometry} material={materials.blacktrim} position={[0.536, -0.193, -0.479]} rotation={[3.141, -0.006, -1.582]} scale={0.445} />
<mesh geometry={nodes.shadeWhite_006.geometry} material={nodes.shadeWhite_006.material} position={[0.536, -0.193, -0.479]} rotation={[3.141, -0.006, -1.582]} scale={0.445} />
<mesh geometry={nodes.axelBlockFL1.geometry} material={materials.blacktrim} position={[1.099, 0, -0.534]} />
<mesh geometry={nodes.tireFR2.geometry} material={materials.blacktrim} position={[0.535, -0.193, 0.474]} rotation={[0, 0, 1.559]} scale={0.445} />
<mesh geometry={nodes.shadeWhite_006001.geometry} material={nodes.shadeWhite_006001.material} position={[0.535, -0.193, 0.474]} rotation={[0, 0, 1.559]} scale={0.445} />
<mesh geometry={nodes.axelBlockFR2.geometry} material={materials['blacktrim.004']} position={[1.099, 0, 0.009]} />
<mesh geometry={nodes.tireRR3.geometry} material={materials.blacktrim} position={[-0.568, -0.193, 0.474]} rotation={[0, 0, 1.559]} scale={0.445} />
<mesh geometry={nodes.shadeWhite_006002.geometry} material={nodes.shadeWhite_006002.material} position={[-0.568, -0.193, 0.474]} rotation={[0, 0, 1.559]} scale={0.445} />
<mesh geometry={nodes.axelBlockRR3.geometry} material={materials['blacktrim.005']} position={[-0.004, 0, 0.009]} />
<mesh geometry={nodes.tireRl4.geometry} material={materials.blacktrim} position={[-0.567, -0.193, -0.479]} rotation={[3.141, -0.006, -1.582]} scale={0.445} />
<mesh geometry={nodes.shadeWhite_006003.geometry} material={nodes.shadeWhite_006003.material} position={[-0.567, -0.193, -0.479]} rotation={[3.141, -0.006, -1.582]} scale={0.445} />
<mesh geometry={nodes.axelBlockRL4.geometry} material={materials['blacktrim.006']} position={[-0.004, 0, -0.529]} />